Research
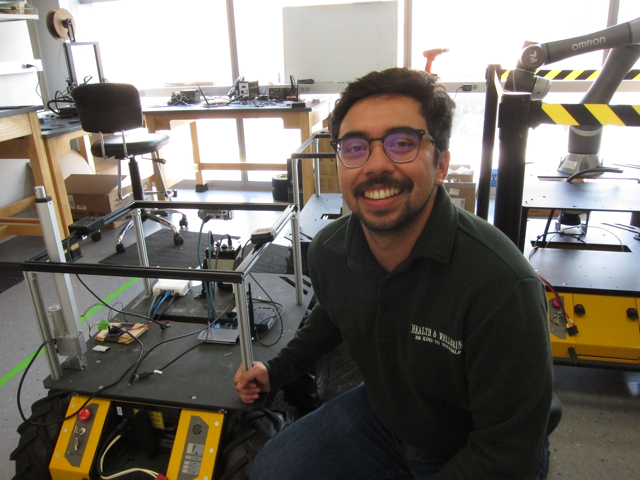
At the Ambulante Lab (Spanish for “mobile”) we study the next generation of robust Multi-Robot Systems. We hope to design and implement fault‑tolerant robotic teams and create coordination strategies that ensure reliability in dynamic, real‑world environments. Key research directions include:
Human-Centered Heterogeneous Robot Teams
We are developing the core infrastructure to create robust planners for heterogeneous teams of robots that work alongside humans. Our approach combines Linear Temporal Logic (LTL), which allows us to formally specify complex collaborative tasks and safety rules, with efficient graph search algorithms. This synthesis enables a key capability: fast and optimal re-planning. The system can dynamically re-calculate team actions in response to robot sensor faults, human interventions, or unexpected obstacles, ensuring the team remains effective and reliable.
Security Games for Autonomous Patrolling
My work in security games develops optimal patrolling strategies for defender agents against intruders with limited information. This line of research provides a scalable framework for applications ranging from physical patrols to cyber-defense. We developed new game-theoretic models that relax the common assumption of fully informed intruders (AAMAS 2019, ICRA 2024). Developed multi-agent coordination schemes for balanced coverage on non-uniform target distributions (ICRA 2020). We also, employed deep reinforcement learning to generate robust defender strategies capable of generalizing across novel intruder behaviors (ICRA 2024).
Example Problem Instance:
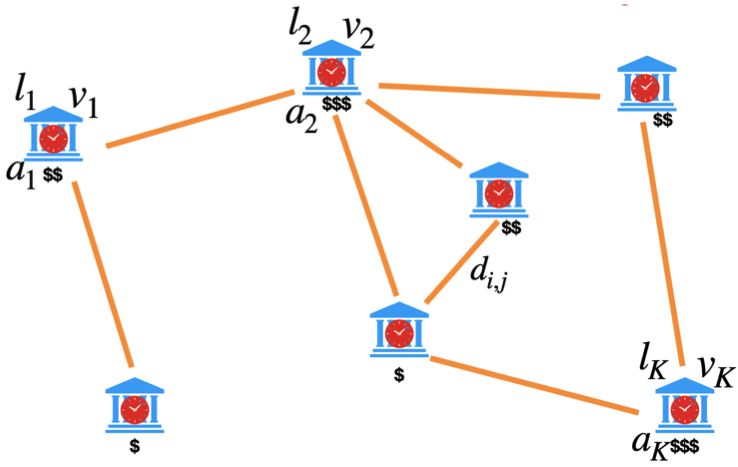
A general instance of the Patrolling Game. Click to view the paper published in ICRA 2024.